
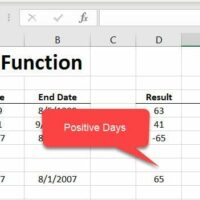
DAYS Function in Excel
Learn how to use the DAYS Function in Excel.
DAYS Function in Excel Read More »
Learn predefined excel functions used to calculate specific values. Excelbuddy covers dozens of functions with easy to follow demonstrations.
Learn how to use the DAYS Function in Excel.
DAYS Function in Excel Read More »
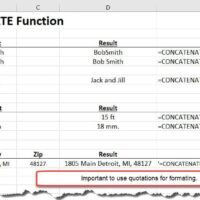
The Excel CONCATENATE function joins multiple strings into a single string. You can combine up to 30 text items together. Syntax: =CONCATENATE (text1, text2, [text3], …) Arguments: text1
CONCATENATE Function Read More »
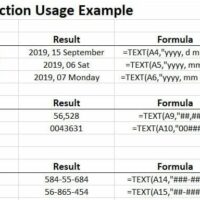
Learn how to use the TEXT Function in Excel.
TEXT Function in Excel Read More »
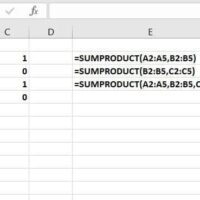
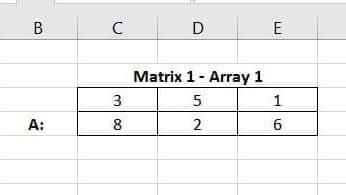
The SUMPRODUCT function in Excel is a useful tool when you are working with large data sets or multiple arrays. An array is simply a series of numbers.
SUMPRODUCT Function Read More »
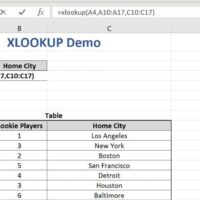
XLOOKUP replaces VLOOKUP AND HLOOKUP permanently! Speed up your spreadsheet by changing your default lookup function. Add a 4th and 5th argument!
XLOOKUP Function in Excel Read More »